ロボティクス


人とロボットが共生する社会に向けて、通信とロボットが調和するロボットフレンドリーな環境実現に関する研究開発
- Robotics as a Service(RaaS)
- Human Robot Interaction(HRI)
- ドローン活用実証
アクティビティ
-

海中で通信できれば海の中で生活できる?「水中通信」の仕組みをKDDIの専門家が解説
-

水上ドローンを活用した藻場調査の実証実験
-
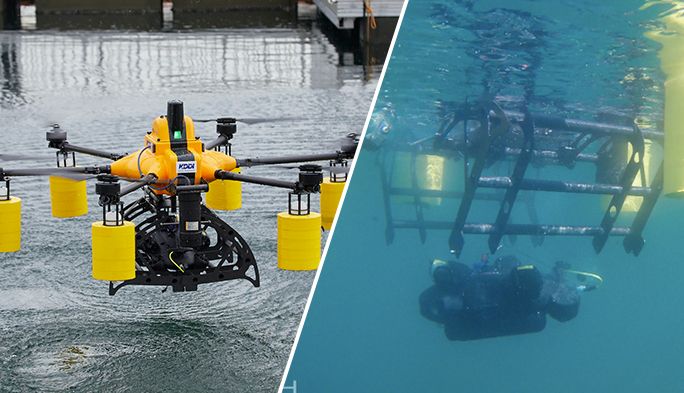
ドローンが分離&合体!空を飛行し、海を潜行するKDDIの「水空合体ドローン」とは
ニュースリリース・トピックス
|
|
|
|
|
論文・国際会議
Proposals and Evaluations of Robotic Attendance at On-site Network Maintenance Works
Takayuki Warabino, Yusuke Suzuki(KDDI), Tomohiro Otani
IEICE Transactions on Communications
2022年11月
Development of combined aerial and underwater drone system
Akihiko Nishitani, Ryoichi Kawada, Junichi Kojima
OCEANS 2022 Hampton Roads
2022年10月
Acoustic positioning system of combined aerial and underwater drones
Ryoichi Kawada, Akihiko Nishitani, Junichi Kojima
OCEANS 2022 Hampton Roads
2022年10月
Quality improvement for real-time free viewpoint videousing view-dependent shape refinement
Ryosuke Watanabe, Tomoaki Konno, Keisuke Nonaka, Tatsuya Kobayashi, Haruhisa Kato, Masaru Sugano
ITE Transactions on Media Technology and Applications
2021年10月
Denoising 3D Human Poses from Low-Resolution Video using Variational Autoencoder
Chihiro Nakatsuka, Satoshi Komorita
2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
2021年10月
受賞・表彰
2023.3.1
フジサンケイグループ「第31回地球環境大賞 総務大臣賞」
水上ドローンで脱炭素社会の実現に貢献
KDDI、KDDI総合研究所、鳥羽市
2022.10.12
第10回ロボット大賞 総務大臣賞
水空合体ドローン
株式会社KDDI総合研究所、KDDIスマートドローン株式会社、株式会社プロドローン
2021.9.8
22nd Asia-Pacific Network Operations and Management Symposium(APNOMS2021)「Best Paper Award」
Robotic Assistance Operation for Effective On-Site Network Maintenance Works
蕨野貴之、鈴木悠祐、大谷朋広
2021.3.12
経済産業省(幹事)、一般社団法人日本機械工業連合会(幹事)、総務省、文部科学省、厚生労働省、農林水産省、国土交通省「第9回ロボット大賞『審査員特別賞』」
母船レス海底調査を可能とする洋上・海中ロボットシステム
Team KUROSHIO(国立研究開発法人海洋研究開発機構、国立大学法人東京大学生産技術研究所、国立大学法人九州工業大学、国立研究開発法人海上・港湾・航空技術研究所、三井E&S造船株式会社、日本海洋事業株式会社、株式会社KDDI総合研究所、ヤマハ発動機株式会社)
2019.8.9
ダイワロジテック物流ロボットプログラミングコンテスト事務局「物流ロボットプログラミングコンテスト最優秀賞」
物流ロボットが多数稼働する未来の物流施設の実現を目的に入荷や出荷の実績データが提供され、ロボットを最適に動かすプログラムを作成しその効率性を競うコンテストで、入荷や出荷の効率性の高さが評価
花野博司