世界初、「自律移動型ロボットとのテラヘルツ帯通信の実証」および「テラヘルツ帯と光無線の縦続接続通信の実証」に成功
~走行中の自律移動型警備ロボットとのGbps級大容量無線通信をフィールドで実証~
2025年5月27日
国立大学法人三重大学
株式会社国際電気
デクセリアルズ フォトニクス ソリューションズ株式会社
株式会社KDDI総合研究所
東洋電機株式会社
国立大学法人三重大学(代表提案者、本部:三重県津市、学長 伊藤 正明、以下 三重大学)、株式会社国際電気(本社:東京都港区、代表取締役社長執行役員 佐久間 嘉一郎、以下 国際電気)、デクセリアルズ フォトニクス ソリューションズ株式会社(本社:栃木県下野市、代表取締役社長 林部 和弥、以下 DXPS)、株式会社KDDI総合研究所(本社:埼玉県ふじみ野市、代表取締役所長 小西 聡、以下 KDDI総合研究所)、東洋電機株式会社(本社:愛知県春日井市、代表取締役社長執行役員 松尾 昇光、以下 東洋電機)は、2025年2月19日、三重県津市の三重大学 講堂・三翠ホールにおいて、走行中の自律移動型警備ロボットとの間で、独自に開発したテラヘルツ帯トランシーバを用いてGbps級で高速通信するフィールド実証(以下 実証1)」に成功しました。自律移動する警備ロボットとのGbps級テラヘルツ帯通信実験は世界初です(注)(図1)。さらに、2025年4月22日、東京都小平市の国際電気 東京事業所構内において、「テラヘルツ帯通信システムとオール光型光無線通信システム(以下 光無線通信システム)を縦続接続し、大容量データを伝送するフィールド実証(以下 実証2)」に成功しました(図2)。これにより、テラヘルツ帯通信システムと光無線通信システムの特長を組み合わせることが可能であることが示されました[1]。また、光ファイバおよび光無線で伝送した光ツートーン信号[2]からテラヘルツ帯の搬送波[3]を生成する、光・無線融合型の構成を採用したことも、特徴の一つです。以上の成果により、それぞれの単独システムでは対応が難しかった新たなユースケースへの適用が期待できます。例えば、大規模イベントの会場に最寄りの光ファイバと会場を光無線で接続し、会場内に複数のテラヘルツ帯スモールエリア[4]を設置して、エリア内を走行する自律移動型警備ロボットとの高速通信を可能とするようなユースケースが想定されます(図3)。
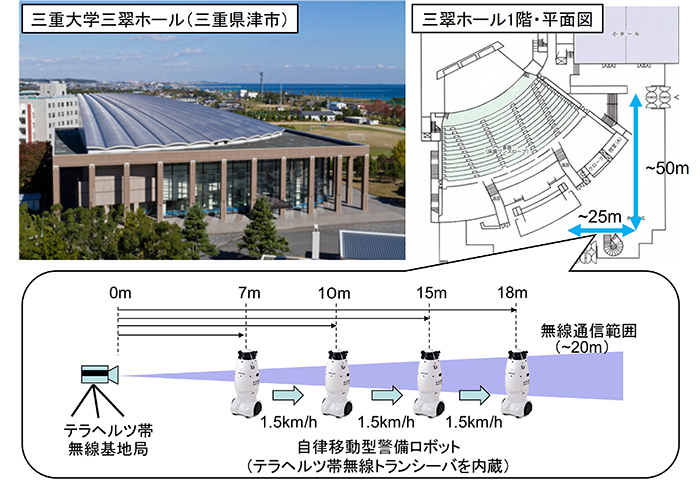
図1 自律移動型警備ロボットとの高速テラヘルツ帯通信実証実験
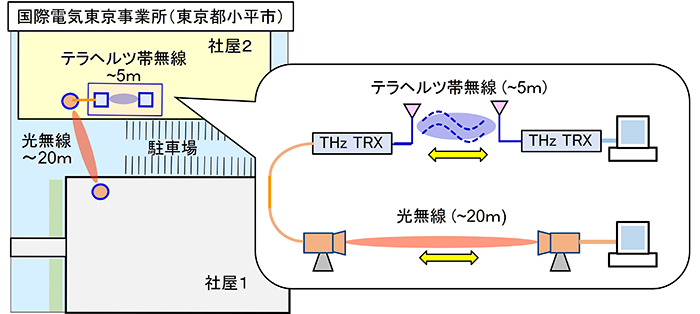
図2 テラヘルツ帯・光無線縦続接続通信システムの実証実験
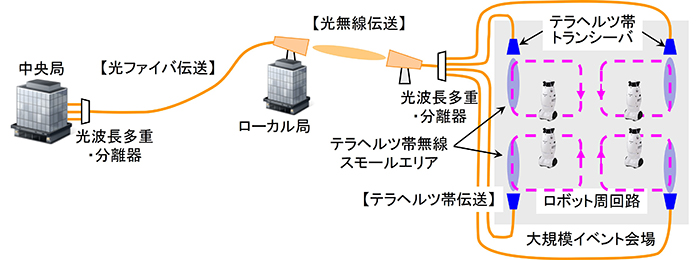
図3 光ファイバ、光無線およびテラヘルツ帯を縦続接続した通信システムによる
大規模イベント会場でのスモールエリア構築のイメージ図
会場直近の光ファイバから例えば会場の屋上と光無線で接続し、会場内に複数のテラヘルツ帯スモールエリアを構築する。
一般来場者向けの臨時設営回線と分離することで、大容量データ通信が可能となる。
本実証は、国立研究開発法人情報通信研究機構(NICT(エヌアイシーティー))の「革新的情報通信技術(Beyond 5G(6G))基金事業」委託研究「Beyond 5G 超大容量無線ネットワークのための電波・光融合無線通信システムの研究開発(以下 本プロジェクト)」(JPJ012368C00501)の一環として行いました。また、自律移動型警備ロボットとの大容量通信実験は、SEQSENSE株式会社[5]の協力により実現することができました。
1.報道発表の詳細
(1)研究開発の背景
本プロジェクトでは、Beyond5G無線で要求される「超高速性(>10Gbps/ch)」、「低遅延性(~100μs)」、「多数同時接続性(~100ch/m2)」を実現するための高度な通信技術および電波・光融合無線技術の研究開発を進めてきました。特に、開発したテラヘルツ帯通信システムおよび光無線通信システムの早期の社会実装に向けた取り組みを重視し、それぞれ単体の通信システム、さらには両システムを縦続接続した通信システムについて、将来のユーザに訴求するためにリアリティのあるユースケースをそれぞれ例示するべく、フィールド実証デモを企画・実施することとしました。
光無線通信システム単体については、2024年10月にユースケースとしてモータースポーツイベントの中継を想定した複数チャネル非圧縮多視点映像の大容量伝送のフィールド実証デモを実施し、機動的な臨時回線の設営性、および光ファイバ通信システムとのシームレスな接続性を実証しました[6]。
(2)実証1 自律移動型警備ロボットとの高速テラヘルツ帯通信実験
・日付:2025年2月19日
・場所:三重大学講堂・三翠ホール(三重県津市)
・内容:今回の実証1では、国際電気が開発した小型テラヘルツ帯トランシーバを使って実証試験を行いました。自律移動型警備ロボット(SEQSENSE製)の筐体内部に本プロジェクトで開発したテラヘルツ帯トランシーバを実装し、ロボットが時速約1.5kmで移動中に対向する固定基地局のテラヘルツ帯トランシーバとの間で双方向通信実験を実施しました。三重大学講堂・三翠ホールのホワイエに基地局を設置してアンテナを調整し、テラヘルツ帯通信が可能になるエリア(幅~1m、長さ20m)を設定し、自律移動型警備ロボットが通信可能エリアを走行中にデータ通信を行い、4.54 Gbpsの通信速度が得られることを確認しました[7] (図4)。

図4 自律移動型警備ロボットとのフィールド実証実験の様子
・特徴:屋内のユースケースを想定して、床面反射によるマルチパスフェージング[8]および空間伝搬減衰を考慮した上でテラヘルツ帯スモールエリアを設定し、自律移動型警備ロボットがエリア内を通過する時間内にデータ伝送を行いました。これにより、世界で初めて、自律移動型ロボットに対するGbps級のテラヘルツ帯双方向通信を実証しました。データ通信用のインタフェースに、イーサネット規格に準拠した市販の25GbE SFPトランシーバ[9]を利用したことも、特徴の一つに挙げられます。さらに、市販の警備ロボットにテラヘルツ帯トランシーバを内蔵するというコンパクトな実装形態を実現したことも、特筆できる特徴の一つです。
(3)実証2 テラヘルツ帯・光無線縦続接続通信実験
・日付:2025年4月22日
・場所:国際電気東京事業所・構内(東京都小平市)
・内容:通信システムの全体構成は、図5に示すとおりです。敷地内で対向する二つの建物の窓際に東洋電機が開発した光無線トランシーバを設置し、屋外伝送距離は約20mとしました。また国際電気が開発したテラヘルツ帯トランシーバは電波無響室内に設置し、伝送距離は約5mとしました。光ファイバ伝送部の構築はKDDI総合研究所が担当しました。サーバのインタフェースは実証1と同様に25GbE SFPを用い、波長多重器を用いて一芯双方向伝送としました。また下り信号(図5の左から右方向)については、光・無線融合型の構成を採りました。具体的には、波長多重器で光ツートーン信号を25GbEデータ信号と多重・分離してテラヘルツ帯トランシーバまで伝送後、DXPSが開発したW帯フォトレシーバ[10]で91 GHzのトーン信号を抽出し、三逓倍して生成したテラヘルツ帯搬送波(273GHz)をデータ信号で変調しました。以上の構成により、実証1と同じ4.54 Gbpsの通信速度が安定的に得られることを確認しました。

図5 テラヘルツ帯・光無線縦続接続実験構成概略図
†1: W帯フォトレシーバ[10]、†2: 周波数三逓倍器、†3: モノリシックマイクロ波集積回路[11]
・特徴:図5に示すような光ファイバ、光無線およびテラヘルツ帯の各伝送方式それぞれの長所を組み合わせた縦続接続型ハイブリッド伝送システムを構築し、実証1で示したテラヘルツ帯通信システムのユースケースをさらに拡張できる可能性を示しました。下り信号については、光・無線融合型の構成でテラヘルツ帯トランシーバの小型化・省電力化を図ったことも特徴の一つです。
2.テラヘルツ帯トランシーバについて
次世代の無線通信での利用が有力視されている「テラヘルツ帯」の電波を用いて、高速・大容量通信を実現することができます。従来の無線通信で用いられている「マイクロ波」や「ミリ波」に比べて周波数が10~100倍高いため、100Gbps級の大容量通信が可能です。国際電気が開発したテラヘルツ帯トランシーバは、テラヘルツ帯搬送波を光ツートーン信号から生成する機能を搭載しているために、制御局から無線信号の周波数を直接、正確に制御することが可能です。
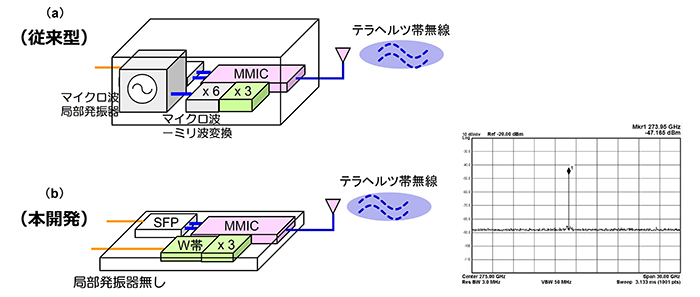
図6 テラヘルツ帯無線トランシーバの構成概略図
(a)従来型構成、(b)本開発(光ツートーン信号型)の構成と観測したテラヘルツ帯無線信号スペクトル
3.用語説明
[1] 各伝送方式の長所・短所を下表にまとめて示します。
| 伝送方式 | 長所 | 短所 | |
|---|---|---|---|
| 光ファイバ伝送 | ・超大容量(≧100 Gbps) ・超長距離(≧100 km) | ・光ファイバの敷設が必須 ・固定地点間 | |
| オール光型光無線伝送 | ・光ファイバとのシームレスな接続性=超大容量(≧100 Gbps) ・長距離(~1km) ・無線伝送=光ファイバ敷設不要、機動的に設営可能 | ・対移動体通信には高精度追尾機能を有する端末が必要 ・光の遮断で通信途絶→本プロジェクトの中で対応技術を開発済、今回は未適用 | |
| テラヘルツ帯伝送 | ・大容量(~50 Gbps) ・無線伝送 ・移動体収容可能 | ・短距離(~100 m)→面的にカバーするためにはスモールエリアの多数設置が必要 | |
3つの伝送方式それぞれの短所を相互補完し長所を組み合わせることで、本文に記載したような新たなユースケースへの適用が可能となります。
[2] 光ツートーン信号:波長の異なる二つの光を高速フォトダイオードに入力すると、その波長差に対応する周波数の信号を抽出することができます。今回は、91 GHz間隔(波長差に換算して0.72 nm)の二つの波長の光を単一の光源から生成する技術を適用し、DXPSが開発した高速フォトダイオードと増幅器の一体化モジュール「W帯フォトレシーバ[10]」で91 GHzのミリ波帯信号を抽出しました。
[3] 搬送波:情報(信号)を送受信するために使用される電波や光、あるいは音波などの波を指します。搬送波は、通常単一周波数の正弦波であり、それを信号で変調することにより波に情報を載せることができます。今回の実証1および実証2のテラヘルツ帯通信システムの搬送波の周波数は273 GHzとしました。
[4] スモールエリア:テラヘルツ帯の信号は、ミリ波帯やマイクロ波帯等の低い周波数と比べて空間伝搬減衰が大きいため、カバーできるエリアが小さくなります。一方、信号帯域を広げることができるため、伝送速度を大幅に向上することが可能です。したがって、図1に示したような比較的狭いエリア、すなわちスモールエリアに絞って短時間で大容量データ通信を行うようなユースケースに適しています。
[5] SEQSENSE株式会社。日本国内で自律移動型ロボットの製造・開発を行う。ソフトウェア、ハードウェア、クラウドシステム、サービス設計から導入にかかわるコンサルタント業務まで自社で手がけ、主力製品である警備ロボット「SQ-2」シリーズは、2025年5月時点で全国70台以上の導入を達成している。
[6] KDDI総合研究所プレスリリース
世界初、鈴鹿サーキットで4K非圧縮マルチチャネル映像の光無線伝送に成功
~光ファイバの敷設が困難な場所で100Gbpsの大容量通信を実現~
[7] 今回のフィールド実証デモのように外部に開けた環境で無線通信実験を行う場合、総務省より「実験試験局」の免許を受ける必要があります(但し光無線通信実験は免許不要)。免許取得には、「登録事業者等による点検」を受けねばなりませんが、本実証実験の点検では、物理通信速度5 Gbps(クライアントのデータ通信速度として4.54 Gbps)を上回る超広帯域のテラヘルツ帯信号を測定できなかったため、通信速度の上限が4.54 Gbpsに制限されました。
[8] マルチパスフェージング:テラヘルツ帯等の電波は、アンテナから放射される際に進行方向(直進波)以外に進む成分が存在するため、例えば床面や壁面から反射された不要成分が直進波と干渉を起こします。これにより、通信相手の移動に伴って受信強度が変動してしまい、通信品質に影響を与えます。このような現象がマルチパスフェージングです。
[9] SFPトランシーバ(Small Form-factor Pluggable transceiver):サーバなどの様々なネットワーク機器を、標準規格に準拠した通信プロトコルで相互接続するための通信インタフェースです。必要とする通信規格、速度および距離に対応して、光ファイバ、同軸ケーブル、ツイストペアケーブル等の伝送媒体を選択することができます。
[10] W帯フォトレシーバ:W帯とは、75 ~ 110 GHzの周波数帯です。[1]に記述したとおり、フォトレシーバは高速フォトダイオードとW帯増幅器を一体化集積し、さらに入力光ファイバおよびミリ波帯トーン信号出力同軸コネクタを一体化させたモジュール構造となっています。
[11] モノリシックマイクロ波集積回路(MMIC):単一の半導体基板上に複数のマイクロ波回路素子を集積した集積回路です。個別のマイクロ波部品を接続した回路構成の場合に比べて、小型化・高信頼性化を実現できます。
(注)2025年5月9日 共同研究者調べ。
※ニュースリリースに記載された情報は、発表日現在のものです。 商品・サービスの料金、サービス内容・仕様、お問い合わせ先などの情報は予告なしに変更されることがありますので、あらかじめご了承ください。